С быстрым внедрением искусственного интеллекта в повседневную жизнь технология не затрагивает никого, даже традиционного фермера.
Обзор сельскохозяйственного инвентаря последнего поколения дает представление о том, как далеко продвинулось современное сельское хозяйство.
Ecorobotix, “стол на колесах” с GPS-навигатором шириной семь футов, как некоторые его описывают, представляет собой устройство, работающее на солнечной батарее, которое перемещается по полям с растениями и уничтожает сорняки с предельной точностью. Он может похвастаться 95%-ным коэффициентом полезного действия практически без отходов.
Универсальные роботизированные системы Energid могут собирать цитрусовые, такие как апельсины и грейпфруты, с помощью роботизированной системы, оснащенной несколькими камерами и гибкими манипуляторами.
Робот River LettuceBot сканирует геометрию посевов и обеспечивает оптимальный рост и минимальное использование пестицидов, различая сорняки и продукт, поскольку он прореживает чрезмерно густонаселенные овощные культуры. Это предотвращает перенасыщение и болезни.
PrecisionHawk помогает во всех типах роботизированных фермерских операций с помощью дистанционного зондирования и аналитики на базе беспилотных летательных аппаратов.
Ученые продолжают тестировать новые подходы для повышения эффективности решения сельскохозяйственных задач.
В университетах Эдинбурга в Шотландии и Шеффилда в Англии исследователи решают проблему визуальной навигации сквозь густую растительность, что является сложной задачей для роботизированных структур, выполняющих задачи на неровной и немаркированной местности.
При этом они опирались на крошечную модель для вдохновения: Formica rufa, более известную как муравей.
Муравьи могут быть крошечными, но они справляются с большими задачами. Они решают сложные организационные вопросы и имеют систематическое разделение труда. И они неплохо зарекомендовали себя в отделе эволюции: им около 100 миллионов лет. По оценкам энтомологов, сегодня среди нас живет до 20 квадриллионов особей. Это означает, что их масса была бы примерно эквивалентна массе всех людей, живущих сегодня.
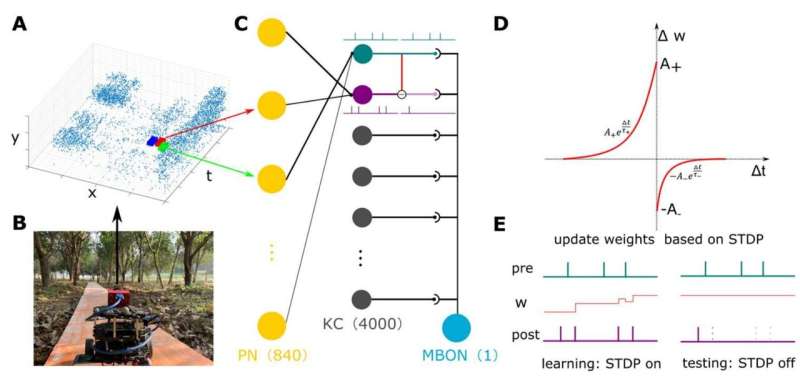
В статье “Изучение нейроморфных последовательностей с помощью камеры событий на маршрутах через растительность”, опубликованной в журнале Science Robotics, профессора заявили, что они искали “маломощные, эффективные бортовые решения” для своих исследований в области роботизированной навигации.
“Мы черпали вдохновение у насекомых, таких как муравьи, которые способны обучаться и следовать маршрутам в сложных природных условиях, используя относительно ограниченные сенсорные и нейронные системы”, – сказал исследователь Ле Чжу.
“Мозг насекомых, в частности, обеспечивает мощное сочетание оперативности и результативности”, – сказал Чжу. “Здесь мы приводим пример такого подхода, реализуя сеть для запоминания визуальных маршрутов на нейроморфном оборудовании, которая непосредственно опиралась на последние достижения нейробиологии насекомых”.
Они разработали искусственную нейронную сеть, которая, по сути, помогает роботам, управляя ими в сложных условиях с густой растительностью.
“Даже “простые” животные, такие как муравьи, могут преуспеть в навигации в естественных условиях на открытом воздухе… которые все еще бросают вызов современным роботам”, – сказал Чжу. “Одна из проблем в таких средах заключается в распознавании ранее посещенных мест или пройденных маршрутов в качестве основы для навигационной системы”.
Они построили робота, который собирает изображения по незнакомым маршрутам, и разработали алгоритм, основанный на схемах, обнаруженных в мозге насекомых.
Они опирались на предыдущие исследования памяти насекомых и “грибных тел”, структурных компонентов мозга насекомых, которые анализируют сенсорную информацию — особенно запахи — и интегрируют ее с навигацией и такими задачами, как поиск пищи и избегание врагов.
Исследователи протестировали свою нейронную модель на сложных маршрутах по неровным, грязным, густо заросшим растительностью полям и добились положительных результатов. Они сказали, что их исследования показывают перспективность для будущих применений в сельском хозяйстве, лесном хозяйстве и мониторинге окружающей среды.
“Мы использовали биоинспирированную камеру событий на наземном роботе для сбора визуальных последовательностей вдоль маршрутов в естественных условиях на открытом воздухе и применили нейронный алгоритм для пространственно-временной памяти, который тесно основан на известной нейронной цепи в мозге насекомого”, – сказал Чжу. “Мы показываем, что этот метод правдоподобен для поддержки распознавания маршрутов для визуальной навигации”.